Verkabelung des Ardurobots
Zuerst schauen wir uns die richtige Verkabelung an. Anschliessend lassen wir den Roboter zum ersten Mal herumfahren. Programmiert wird in diesem Posten noch nicht. Das kommt erst später.
Verkabelung vom Arduino und dem DD1-1
Hier ist grosse Exaktheit geboten! Eine der grössten Fehlerquellen beim Aufbau eines Roboters ist nämlich das Verkabeln. Wenn du hier einen Fehler machst, wird das Programm einfach nicht funktionieren, auch wenn du es noch so fehlerfrei geschrieben hast.
Darum habe ich der richtigen Verkabelung einen ganzen Posten gewidmet, damit dies klappen wird.
Ziel des Postens
Du kannst den Ardurobot richtig verkabeln und hast herausgefunden, wie du ihn zum Fahren bringen kannst.
Material
- Ardurobot (Fertig aufgebaut, wie aus Posten 1)
- AA-Batterien
- Breitbandkabel (Buchse - Stecker)
- Steckkabel
Verkabelung
Nun folgt eine Anleitung, wie das Roboter-Chassis mit dem Arduino zu verkabeln ist.
Wichtig: Es kann sein, einige deiner Kabel andere Farben haben als diejenigen auf den Fotos. Das macht nichts! Wichtig ist, dass die Kabel am richtigen Ort eingesteckt werden.
Schritt 1:
Damit dein Arduino die nötige Power hat, muss er zuerst an die Stromquelle angeschlossen werden. Das geht folgendermassen: Du nimmst das rote und das schwarze Kabel von deinem Batterie-Halter (diese beiden Kabel sind immer rot und schwarz). Nun steckst du das rote Kabel in ein Loch der Leiterliste, die mit Plus (+) gekennzeichnet ist.
Danach nimmst du das schwarze Kabel und steckst es in ein Loch auf der gleich daneben liegenden Leiterliste Minus (–). Wie das aussieht, siehst du im Bild.

Schritt 2:
Im Moment hat der Roboter noch immer keinen Strom.
Als nächstes versorgen wir unseren Arduino mit dem nötigen Strom.
Der Arduino hat einen Pin mit der Bezeichnung "Vin". Das heisst etwa soviel wie "hier kommt der Plus-Strom rein". Gleich daneben befindet sich der Pin "GND". Dieser ist für das Minus bestimmt.
Verbinde nun mit einem Steckkabel (Stecker - Stecker) den Pin "Vin" mit der Leiterliste (+) und mit einem anderen Steckkabel den Pin "GND" mit der Leiterliste (–). Es ist wichtig, dass du dieselben Leiterlisten wählst, in die du in Schritt 1 das rote bzw. das schwarze Kabel gesteckt hast.
(siehe Bild)

Schritt 3:
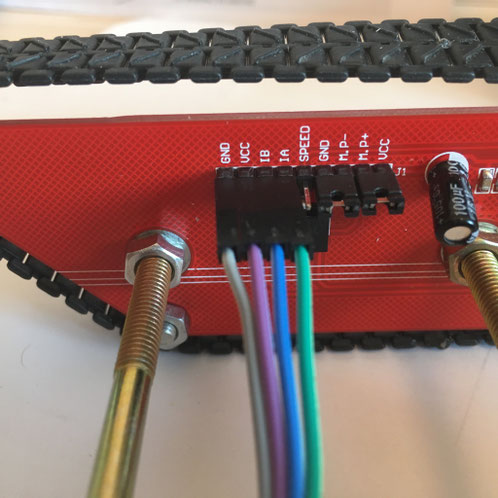
Jetzt verkabeln wir den Arduino mit dem Chassis. Für die Verkabelung brauchen wir vier Steckkabel (Stecker - Buchse). Es empfiehlt sich, dafür ein Breitband-Kabel zu verwenden. Die Buchsen der Steckkabel werden wie dargestellt in die Pins am Chassis gesteckt.
(Siehe Bild)
Schritt 4:
Als nächstes werden die Stecker der Steckkabel aus Schritt 3 mit dem Arduino und dem Breadboard verbunden. Die Kabel aus den Pins IA und IB (Siehe Bild bei Schritt 3) kommen in den Arduino während die aus den Pins GND und Vcc mit dem Breadboard verbunden werden.
Stecke dazu das Ende von "IA" (bei mir grün) in den Pin 5 auf deinem Arduino und das Ende von "IB" (bei mir blau) in den Pin 6.
"GND" wird mit der bereits verwendeten Leiterliste (–) auf dem Breadboard verbunden und "Vcc" mit der Leiterliste (+).
(Siehe Bild)

Schritt 5:
Nun wird die andere Seite des Chassis' genau gleich wie die erste mit dem Arduino verbunden:
Du nimmst wieder vier Steckkabel und steckst die vier Buchsen bei der anderen Chassis-Seite ein.
Stecke nun das andere Ende von "IA" (bei mir gelb) in den Pin 10 auf deinem Arduino und das Ende von "IB" (bei mir orange) in den Pin 11.
"GND" (bei mir braun) und "Vcc" (bei mir rot) werden genau gleich wie beim vorigen Schritt mit (–) bzw. (+) auf deinem Breadboard verbunden.
(Siehe Bild)


Es ist ratsam, zu notieren, welche Kabelfarbe für welchen Pin vom Chassis gilt. Mit der Zeit werden nämlich so viele Kabel involviert sein, dass es sonst schwierig wird, die Übersicht zu behalten. Ich rate dir an, dafür eine kleine Tabelle zu erstellen. Diese Tabelle kannst du dann später immer wieder verwenden.
Bei mir sieht eine mögliche Tabelle so aus:
|
Farbe |
Chassis |
Board |
|
Grau |
GND rechts |
Breadboard - |
|
Violett |
VCC rechts |
Breadboard+ |
|
Blau |
IB rechts |
Pin 6 |
|
Grün |
IA rechts |
Pin 5 |
|
Braun |
GND links |
Breadboard - |
|
Rot |
VCC links |
Breadboard+ |
|
Orange |
IB links |
Pin 11 |
|
Gelb |
IA links |
Pin 10 |
Erstelle selber eine Tabelle mit deinen Informationen.
Super! jetzt sollte die Verkabelung abgeschlossen sein. Das war doch nicht schwer, oder? Der Roboter macht jetzt noch keinen Wank. Das ist gut so, denn er sollte sich ja auch noch nicht bewegen. Er soll sich genau dann bewegen, wenn wir es ihm befehlen. Doch wie befiehlt man dem Roboter, dass er fahren soll?
Vertiefungsaufgaben
Schauen wir uns doch das Fahrwerk einmal genauer an:
Vertiefungsaufgabe 1:
Ziehe das Kabelende bei Pin 5 ("IA") wieder aus dem Pin heraus und stecke es in die Leiterliste (+). Was passiert?
Vertiefungsaufgabe 2:
Steck das Kabel "IA" wieder zurück in den Pin 5. Ziehe nun das andere Kabel ("IB") aus dem Pin 6 heraus und stecke es in die Leiterliste (+). Was passiert nun?
Vertiefungsaufgabe 3:
Mache die genau gleichen Versuche mit den beiden Kabeln der Pins 10 und 11. Was stellst du hier fest?
Weiteres Untersuchen:
Was wird wohl geschehen, wenn du gleichzeitig "IA" und "IB" des gleichen Motors mit dem (+) verbindest? Oder was passiert, wenn du gleichzeitig "IA" des einen und "IB" des anderen Motors mit dem (+) verbindest? Probiere es ruhig aus!
Rückblick
In diesem Posten hast du deinen Roboter korrekt verkabelt. Zusätzlich hast du bei den Vertiefungsaufgaben auch schon einige Experimente und Versuche mit dem Chassis durchgeführt. Dabei hast du wertvolle grundlegende Kenntnisse gewonnen, wie sich die Motoren des Chassis verhalten und wie man diese richtig Ansteuert.
Zusammenfassend lässt sich sagen:
Sobald auf einem der Kabel "IA" oder "IB" Strom gegeben wird, beginnt der Motor zu drehen. Gibst du auf "IA" Strom, dann dreht der Motor in die eine Richtung, und gibst du Strom auf "IB", so dreht der Motor in die entgegengesetzte Richtung.
Lässt du die beiden Motoren in die gleiche Richtung drehen, dann fährt der Roboter entweder vor- oder rückwärts. Lässt du die beiden Motoren in die entgegengesetzte Richtung drehen, dann dreht sich der Roboter um die eigene Achse.